行车辅助线生成1-运动学模型及后轮轨迹
如果想要用程序控制车辆的运行, 需要先建立车辆运动的数学模型. 车辆的运动学模型已经很成熟了, 并且有多种, 可参考: https://zhuanlan.zhihu.com/p/103834150, https://blog.csdn.net/AdamShan/article/details/78696874, https://zhuanlan.zhihu.com/p/130502383 等.
本文介绍最广泛使用的自行车模型, 以及如何生成行车辅助线.
前轮驱动的自行车模型
自行车模型(Bicycle Model)非常简单, 基于如下假设建立:
- 不考虑车辆在垂直方向(Z轴方向)的运动,即假设车辆的运动是一个二维平面上的运动。
- 假设车辆左右侧轮胎在任意时刻都拥有相同的转向角度和转速;这样车辆的左右两个轮胎的运动可以合并为一个轮胎来描述。
- 假设车辆行驶速度变化缓慢,忽略前后轴载荷的转移。
- 假设车身和悬架系统都是刚性系统。
- 假设车辆的运动和转向是由前轮驱动(front−wheel−only)的。
因此, 我们把一辆车的运动抽象成只有前后两轮的自行车, 很简单:

以下描述这个自行车模型的运动模型:

其中:
- ICR: 车轮的旋转中心
- R: 转弯半径
- δ: 车轮的转角
- L: 轴距(前后车轴的距离)
因为程序控制车辆运动时需要地图, 或者说坐标, 所以我们需要把上述模型放到坐标系中讨论:

其中 θ是车辆相对于坐标系的朝向角. 因为不同的坐标系之间可以相互转换, 因此此处的(X, Y)坐标系可以是车体坐标系, 相机坐标系, 世界坐标系等等, 并不限制.
| 变量 | 含义 | 下一时刻的值 | 备注 |
|---|---|---|---|
| x | 车辆坐标: x | x = x + v * cos(θ) * dt | 坐标: x |
| 下一时刻的x = 当前时刻的x + 短时移动距离在X方向的分量 | |||
| 下一时刻的x = x + v * cos(θ) * dt | |||
| y | 车辆坐标: y | y = y + v * sin(θ) * dt | 坐标: y |
| 下一时刻的y = 当前时刻的y + 短时移动距离在Y方向的分量 | |||
| 下一时刻的y = y + v * cos(θ) * dt | |||
| θ | 车辆朝(航)向角度 | θ = θ + v * tan(δ) / L * dt | 车头朝向: (假设车辆慢速, 转向中心不变, 则后轮角速度 = 前轮角速度 = 车辆朝向角速度) |
| 下一时刻的车头朝向 = 当前时刻的车头朝向 + 前轮角速度 * 时间间隔 | |||
| 其中: | |||
| (1) 后轮角速度 = V / R | |||
| (2) 而tan(δ) = L / R | |||
| (3) 联立(1)(2)可得: 后轮角速度 = V * tan(δ) / L | |||
| 因此: | |||
| 下一时刻的车头朝向 = θ + V * tan(δ) / L * dt | |||
| v | 车辆瞬时线速度 | v = v + a * dt | 瞬时速度: 下一时刻的速度 = 当前时刻的速度 + 加速度 * 时间间隔 |
上表中我们用(x, y, θ, v)表示自行车模型, 并给出了基于当前时刻的状态计算下一时刻状态的公式.
实现
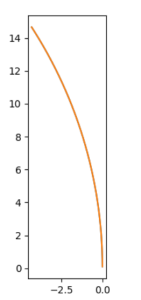
我们可以用Python实现上述模型, 并生成行车辅助线.
def tractor(front_steer_angle=0.0, current_phi=float(math.pi / 2), vehicle_length=15.4, wheelbase=7.7):
"""
:param front_steer_angle: 前轮转角
:param current_phi: 车头朝向: 向前, 车体坐标, 摄像头位置为原点
:param vehicle_length: 超过一个车长(15.4)米时停止计算
:param wheelbase: 轴距
:return: 轨迹
"""
current_x = current_y = 0.0
delta_distance = 0.1 # 每0.1米计算一个点
total_distance = 0
(x, y, phi) = ([], [], []) # (轨迹坐标, 车体朝向)
# https://zhuanlan.zhihu.com/p/128101546
while total_distance < vehicle_length:
next_x = current_x + delta_distance * math.cos(current_phi)
next_y = current_y + delta_distance * math.sin(current_phi)
next_phi = current_phi + delta_distance / wheelbase * math.tan(front_steer_angle)
x.append(next_x)
y.append(next_y)
phi.append(next_phi)
current_x = next_x
current_y = next_y
current_phi = next_phi
total_distance += delta_distance
return [x, y, phi]
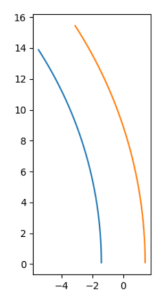
将轨迹拓展成辅助线
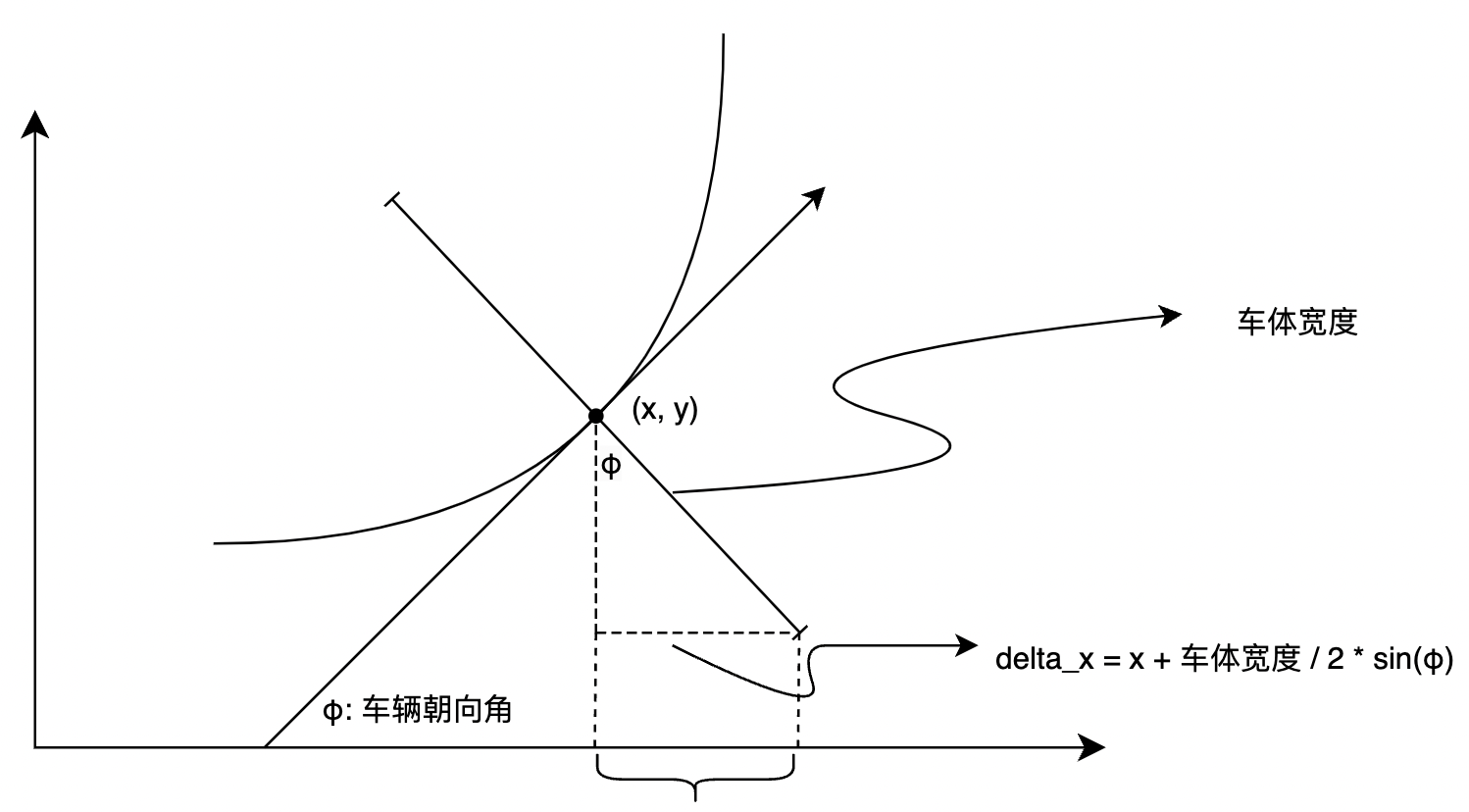
其中(x, y) 为任意轨迹点, delta_x为右侧车体对应点的x偏移量, 因此车辆右侧对应点的x坐标为: x_右 = x + delta_x. 相似的, 可以求的y_右, x_左, y_x, 不再赘述. 详情可见如下实现代码:
def trajectory2reference_line(x, y, phi, vehicle_width=2.85):
# 根据轨迹拓展成左右两条线
(left_x, left_y, right_x, right_y) = ([], [], [], [])
for i in range(len(x)):
base_x = x[i]
base_y = y[i]
base_phi = phi[i]
left_x.append(base_x - vehicle_width / 2 * math.sin(base_phi))
left_y.append(base_y + vehicle_width / 2 * math.cos(base_phi))
right_x.append(base_x + vehicle_width / 2 * math.sin(base_phi))
right_y.append(base_y - vehicle_width / 2 * math.cos(base_phi))
return [left_x, left_y, right_x, right_y]
总结
本文介绍了自行车模型, 并实现了自行车模型的运动模型, 以及如何将车辆的轨迹拓展成行车辅助线. 本文的代码可以用于车辆运动的仿真, 以及车辆行驶的辅助线生成.
代码实现的是后轴中心的行车轨迹, 如果要实现前轴中心的行车轨迹, 需要对轨迹计算作业微调.